



ę╗ĘNė├ė┌ā”ė═╣▐Ąū░Õ╚▒Ž▌ūįäė╗»Öz£yčbų├įOėŗ
üĒį┤Ż║ĪČ╣▄Ą└▒ŻūoĪĘļsųŠ ū„š▀Ż║═§├„▓©1Ż¼═§ŠS▒¾2Ż¼į°åó┐Ų3 ĢrķgŻ║2018-7-3 ķåūxŻ║
═§├„▓©1Ż¼═§ŠS▒¾2Ż¼į°åó┐Ų3
1Īó╬„─Ž╣▄Ą└╠mų▌▌öė═ÜŌĘų╣½╦Š
2Īóųąć°╩»ė═╣▄Ą└┐Ų╝╝蹊┐ųąą─
3Īó┤©æcŃ@╠Į╣ż│╠╣½╦Šė═Į©╣½╦Š
ā”╣▐╩Ū┤µā”įŁė═Īó│╔ŲĘė═Īó╩»╗»«aŲĘ║═įŁ┴ŽĄ─ųžę¬įOéõĪŻļSų°ā”╣▐Ą─┤¾┴┐Į©įņ║═╩╣ė├Ż¼ā”╣▐░▓╚½▀\ąąĄ─ųžę¬ąįę▓╚šęµ═╣’@ĪŻā”╣▐Ą─░▓╚½ļ[╗╝ų„ę¬╩Ūā”╣▐Ą─Ė»╬gŻ¼╠žäe╩Ū╣▐Ąū░ÕĖ»╬gęį╝░ė╔┤╦įņ│╔Ą─ą╣┬®ĪŻā”╣▐ę╗Ą®░l╔·å¢Ņ}Ż¼īóĢ■įņ│╔ć└ųžĄ─ĮøØ·ōp╩¦║═ŁhŠ│╬█╚ŠŻ¼╔§ų┴ßä│╔ć└ųžĄ─╔·«a╩┬╣╩Ż¼ų▒Įė╬Ż║”╚╦Ą─╔·├³░▓╚½ĪŻ×ķ▒ŻūCā”╣▐Ą─░▓╚½▀\ąąŻ¼įSČÓć°╝ęČ╝ųŲČ©┴╦ŽÓæ¬Ą─ąąśIś╦£╩╗“ć°╝ęś╦£╩Ż¼ęÄČ©ā”╣▐Ąū░ÕĄ─Öz£y╩Ūā”╣▐Öz£yųąĄ─ę╗ĒŚ▒žąĶā╚╚▌[1]ĪŻ
│Żė├į┌ā”ė═╣▐Ąū░Õ╚▒Ž▌Öz£yĄ─╝╝ągėąŻ║│¼┬Ģī¦▓©Öz£yĪó┬®┤┼Öz£yĪó┤┼ų┬╔ņ┐sĪó C-Æ▀├Ķ[2-3]Ą╚ĪŻ│ŻęÄÖz£y╝╝ągą¦┬╩Ą═Īó│╔▒ŠĖ▀Ż¼ąĶę¬▀MąąļxŠĆĪóķ_╣▐Öz£yŻ¼ŪęÖz£yŪ░ā”ė═╣▐Č╝▒žĒÜŪÕ┐šĪóŪÕØŹĪŻ▓╗Ą½┘MĢr┘M┴”Ż¼Č°Ūę│╔▒Š║▄Ė▀ĪŻ│¼┬Ģī¦▓©Öz£y╝╝ąg┐╔ęįī”ā”ė═╣▐īŹ╩®į┌ŠĆÖz£yŻ¼▓óŪęÖz£yĢr▓╗ę¬Ū¾ī”ā”ė═╣▐▀MąąŪÕ┐š║═ŪÕØŹĪŻįō╝╝ąg┐╔ęįī”Ąū░Õ▀Mąą100%Ą─ų▒Įėįu╣└[4]Ż¼ĘŪ│Ż▀m║Žė┌ā”╣▐Ąū░Õ║═╣▐▒┌Ą─į┌ŠĆ¤oōpÖz£yĪŻ
1 ā”ė═╣▐Ąū░Õ╚▒Ž▌Öz£y¼FĀŅ
į┌ā”╣▐Ąū░Õ╚▒Ž▌Ą─ŲĮ░Õī¦▓©Öz£yæ¬ė├ųąŻ¼┤µį┌Öz£yą¦┬╩Ą═Ą─═╗│÷å¢Ņ}Ż¼ų„ę¬įŁę“╩Ūé„ĖąŲ„Ą─Æ▀├ĶĘĮ╩Į▓╗ē“Ė▀ą¦Ż¼═∙═∙▓╔╚Ī╚╦╣żęŲäėĄ─ĘĮ╩ĮŻ¼ĘŪ▀B└mūįäėąą▀MĘĮ╩ĮĪŻ╝┤├┐═Ļ│╔ę╗Č╬ŠÓļxĄ─Ąū░ÕÖz£yŻ¼╚╦╣ż▓│²═Ō▀ģŠē╔ŽĄ─é„ĖąŲ„ōQą┬Ą─Öz£y³cŻ¼į┌▓ąČ▀^│╠ųą╚▌ęūōpē─é„ĖąŲ„ĪŻÅ─Č°┤¾┤¾ĮĄĄ═┴╦│¼┬Ģī¦▓©Öz£yĄ─ą¦┬╩ĪŻ×ķ┴╦æ¬ī”▀@ę╗å¢Ņ}Ż¼ČÓé„ĖąŲ„Ą─ĘĮ╩Į│Ż▒╗▓╔ė├ĪŻĄ½╩ŪŻ¼ČÓé„ĖąŲ„Ą─ĘĮ╩Į▓ó▓╗─▄īŹ┘|ąįĮŌøQÖz£yą¦┬╩Ą═Ą─å¢Ņ}Ż¼ų╗─▄į┌ ę╗Č©│╠Č╚╔ŽŠÅĮŌ[5-7]Ż¼įŁę“╩ŪŻ║╩ūŽ╚Ż¼ČÓé„ĖąŲ„Ą─ĘĮ╩Į╚į╚╗ąĶę¬╚╦╣ż▓╝ų├▓óęŲäėé„ĖąŲ„Ż¼ø]ėą£p▌pÖz£y╚╦åTĄ─╣żū„žōō·Ż¼ļSų°ā”╣▐Ą─┤¾ą═╗»Ż¼Öz£y╚╦åTĄ─ä┌äėÅŖČ╚īó┤¾Ę∙į÷╝ėŻ╗Ųõ┤╬Ż¼ČÓé„ĖąŲ„Ą─Öz£yĘĮ╩ĮąĶę¬Öz£yāxŲ„Š▀éõ▌^ČÓöĄ┴┐Ą─ą┼╠¢═©Ą└Ż¼į÷╝ė┴╦Öz£y│╔▒ŠŻ¼▓╗└¹ė┌╝╝ągĄ─æ¬ė├═ŲÅVĪŻ
ę“┤╦Ż¼▒Š╬─įOėŗ┴╦ę╗ĘNā”╣▐Öz£yūįäė╗»čbų├Ż¼╦³ų„ę¬ė╔▀\äėł╠ąąÖCśŗ║═ÖCļŖ┐žųŲŽĄĮyā╔▓┐ĘųĮM│╔ĪŻįōčbų├─▄īŹ¼F▀B└mÖz£yĪóé„ĖąŲ„ĮŪČ╚┐╔ūį▀m欚{š¹Īóąąū▀╦┘Č╚┐╔┐žųŲĪŻÅ─Č°▀_ĄĮ╠ßĖ▀Öz£yą¦┬╩Ż¼ĮĄĄ═Öz£y│╔▒ŠĄ──┐Ą─ĪŻ
2 ▀\äėł╠ąąÖCśŗįOėŗ
ā”╣▐Ąū░Õūįäė╗»Öz£yčbų├Ą─▀\äėł╠ąąÖCśŗų„ę¬╩ŪīŹ¼Fī”Öz£yé„ĖąŲ„Ą─ŖA│ųŻ╗▓ó╩╣Ųõį┌Öz£y▀^│╠ųą┼cā”╣▐▀ģŠē░Õ─▄ėą┴╝║├Ą─Įėė|Ż╗═©▀^ė└┤┼ĶF╬³ĖĮį┌ā”╣▐▒┌╔ŽŻ¼ļSų°ļŖÖCĄ─“īäė╩╣š¹éĆčbų├čžų°ā”╣▐▀ģŠē░Õąą▀MĪŻÅ─Č°īŹ¼Fā”╣▐Ąū░Õ│¼┬Ģī¦▓©▀B└mį┌ŠĆÖz£yĄ─▀^│╠ĪŻ
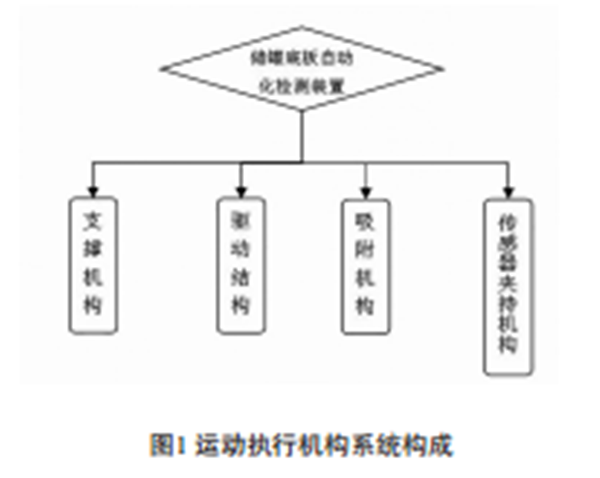
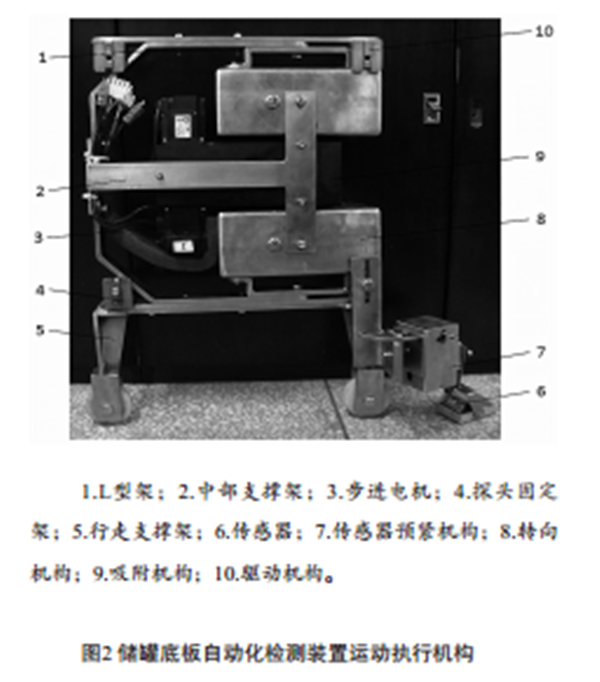
╚ńłD1╦∙╩ŠŻ¼ā”╣▐Ąū░Õūįäė╗»Öz£yčbų├Ą─▀\äėł╠ąąÖCśŗų„ę¬ė╔╦─▓┐ĘųĮM│╔Ż║ų¦ō╬ÖCśŗĪó“īäėĮYśŗĪó╬³ĖĮÖCśŗĪóé„ĖąŲ„ŖA│ųÖCśŗĪŻų¦ō╬ÖCśŗ╩Ū╩╣“īäėÖCśŗĪó╬³ĖĮÖCśŗĪóé„ĖąŲ„ŖA│ųÖCśŗ░▓čbį┌ę╗ŲŻ¼▓ó╩╣š¹éĆÖCśŗ┴óį┌ā”╣▐═Ō▀ģŠē░Õ╔ŽŻ╗“īäėĮYśŗų„ę¬ė╔2éĆ╦┼Ę■ļŖÖCĪóūā╦┘ŽõĪóØL▌å░▓čbÜżĪó²X▌åé„╦═ĦĪó▌S│ąČ╦╔wĪóé„╦═Ä¦ÅłŠočbų├Īó²X▌åĪóé„äė▌SĪóØLäė▌S│ąÖCśŗĪóé„äė²X▌åĄ╚┴Ń╝■ĮM│╔,×ķš¹éĆčbų├╠ß╣®ąąū▀äė┴”Ż╗╬³ĖĮÖCśŗų„ę¬ė╔ØLäė▌S│ąĪó╣╠Č©╠ūĪó┤┼▌åō§╚”Īó²X▌å║═8éĆė└┤┼ŁhĄ╚┴Ń╝■ĮM│╔Ż¼╦³╩Ū═©▀^ė└┤┼▌å╩╣įōčbų├ŠoŠo╬³ĖĮį┌ā”╣▐═Ō▀ģŠē╔ŽŻ╗é„ĖąŲ„ŖA│ųÖCśŗ╩Ū╣╠Č©é„ĖąŲ„Ż¼▓ó╩╣é„ĖąŲ„─▄į┌0ĪŃ~10ĪŃĘČć·ā╚ūįäėĖ∙ō■ā”╣▐═Ō▀ģŠē░ÕŪķørš{š¹āAą▒ĮŪČ╚Ż¼╠ß╣®Įoé„ĖąŲ„ę╗Č©Ą─ē║Šo┴”Ż¼š{š¹é„ĖąŲ„ą┼╠¢░l╔õĘĮŽ“ĪŻĖ∙ō■ęį╔ŽįOėŗę¬Ū¾Ż¼╝ė╣żųŲū„│÷┴╦ā”╣▐Ąū░Õūįäė╗»Öz£yčbų├▀\äėÖCśŗŻ¼╚ńłD2╦∙╩ŠĪŻ
3 ÖCļŖ┐žųŲŽĄĮyįOėŗ
3.1 ŽĄĮyśŗ│╔
ÖCļŖ┐žųŲŽĄĮyų„ę¬╩Ū═©▀^ÖCļŖ┐žųŲŽõīŹ¼Fī”▀\äėł╠ąąÖCśŗųą░▓čbĄ─ā╔éĆ╦ĮĘ■ļŖÖC▀Mąą╣®ļŖĪó╦┘Č╚┐žųŲ║═▀^▌d▒ŻūoĪŻÖCļŖ┐žųŲŽõ├µ░Õ╔ŽįOų├ėą┐žųŲļŖÖCš²Ę┤▐D░┤ŌoĪóļŖį┤ķ_ĻP░┤ŌoĪóā╔éĆ╣╠Č©╦┘Č╚░┤ŌoĪóā╔éĆļŖÖCł¾Š»Å═╬╗ķ_ĻP░┤ŌoĪóļŖÖC¤o╝ēš{╦┘Ų„ĪóļŖÖC▐D╦┘’@╩ŠŲ„║═ŽÓĻPųĖ╩Š¤¶Ą╚Ų„╝■Ż¼╚ńłD3╦∙╩ŠĪŻ

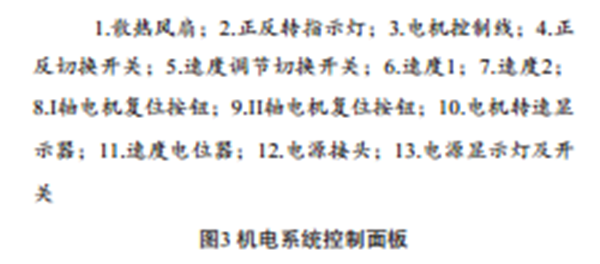
▒ŠÖCļŖ┐žųŲŽĄĮyįOėŗ┴╦ā╔ĘNļŖÖCš{╦┘ĘĮ╩ĮŻ¼ę╗ĘN╩ŪĖ∙ō■Öz£yŽĄĮyą┼╠¢ūRäe╦┘Č╚įOČ©┴╦╚²éĆ╣╠Č©ļŖÖC▐D╦┘Ż¼═©▀^š{╣Ø╦┘Č╚1Īó╦┘Č╚2░┤ŌoīŹ¼FĪŻ«öå╬¬Ü░┤Ž┬╦┘Č╚1Īó╦┘Č╚2░┤ŌoĢr×ķā╔éĆįOČ©╦┘Č╚Ż¼«ö═¼Ģr░┤Ž┬ā╔éĆ░┤ŌoĢr×ķĄ┌╚²éĆįOČ©╦┘Č╚ĪŻĮø▀^ėŗ╦ŃŻ¼░č╚²éĆļŖÖC▐D╦┘ĘųäeįOČ©×ķ100▐D/ĘųĪó200▐D/ĘųĪó300▐D/ĘųŻ¼Å─Č°īŹ¼FÖz£yÖCśŗĄ─ąąū▀╦┘Č╚į┌0.5mm/s-4mm/sų«ķgĪŻįōĘĮĘ©Ą─ā׳c╩Ū╦┘Č╚║ŃČ©Īó▓┘ū„║åå╬Ż╗╚▒³c╩Ū╦┘Č╚å╬ę╗ĪŻ┴Ēę╗ĘN╦┘Č╚š{╣ØĘĮ╩Į╩Ū═©▀^╦┘Č╚ļŖ╬╗Ų„üĒĖ─ūāļŖÖCļŖē║Ż¼Å─Č°īŹ¼FļŖÖCÅ─Ą═ĄĮĖ▀Ą─¤o╝ēš{╦┘ĪŻ▀@ĘNĘĮ╩ĮĄ─ā׳c╩Ū┐╔ęįį┌║▄┤¾ĘČć·ā╚īŹ¼Fī”ļŖÖC╦┘Č╚š{╣ØŻ¼▀mæ¬Ė³ČÓĄ─╣żørŻ╗╚▒³c╩Ūš{╣ØĄ─╦┘Č╚▓╗Š½┤_Ż¼╚▌ęū│÷¼F╦┘Č╚╠°▄SĪŻį┌┐žųŲ├µ░Õ╔ŽįOų├┴╦▀@ā╔ĘNļŖÖC╦┘Č╚š{╣ØĘĮ╩ĮĄ─ŪąōQķ_ĻPĪŻ
ŽĄĮyųąĄ─ā╔éĆ╦┼Ę■ļŖÖC▓╔ė├ā╔éĆ“īäėŲ„å╬¬Ü┐žųŲŻ¼ī”“īäėŲ„įOų├┴╦═¼▓ĮąįŻ¼Å─Č°╩╣ā╔╦┼Ę■ļŖÖC▐D╦┘ŽÓ═¼ĪŻā╔ļŖÖCōĒėą¬Ü┴óļŖį┤ŠĆ║═┐žųŲŠĆŻ¼┐žųŲŽõ╔ŽĄ─I▌SĪóII▌S▀BĮėŠĆĘųäe┼c▀\äėÖCśŗųąĄ─IĪóII╠¢╦┼Ę■ļŖÖCŽÓ▀BĮėĪŻ┐╔ęį═©▀^┐žųŲ├µ░Õ╔ŽĄ─š²Ę┤▐DŪąōQķ_ĻPĖ─ūāÖz£yčbų├Ą─ąąū▀ĘĮŽ“ĪŻė╔ė┌Öz£yčbų├į┌Öz£y▀^│╠ųą┐╔─▄ė÷ĄĮ¤oĘ©ėŌįĮĄ─šŽĄK╬’Ż¼įņ│╔čbų├═Żų╣▓╗äėŻ¼╩╣ļŖÖC┐©ūĪČ°▓╗─▄▐DäėŻ¼ļŖ┴„Ģ■į÷┤¾Ż¼╔§ų┴¤²ē─ļŖÖCĪŻę“┤╦įOėŗ┴╦▀^▌d▒ŻūoļŖ┬ĘŻ¼ī”ļŖÖC▀^▌d║¾Ą─╗ųÅ═╣żū„ĘųäeįOėŗ┴╦ā╔éĆÅ═╬╗ķ_ĻPĪŻ
3.2 │§╩╝ģóöĄįOų├
į┌įOėŗÖCļŖ┐žųŲŽĄĮy╚²éĆįOČ©╦┘Č╚ĢrŻ¼ąĶę¬ī”ļŖÖC▀Mąąį┌ŠĆš{įćĪŻįō╦┼Ę■ļŖÖC┐╔ęį═©▀^sigmawin+īŻśI▄ø╝■ī”Ųõ▀Mąąį┌ŠĆģóöĄš{╣Ø[8]ĪŻ╚ńłD4╦∙╩Š×ķsigmawin+▓┘ū„Įń├µĪŻė├öĄō■ŠĆ║═ļŖį┤ŠĆ░čļŖÖC┼c“īäėŲ„ŽÓ▀BĮėŻ¼į┘ė├USBöĄō■ŠĆ░čļŖ─X┼c“īäėŲ„ŽÓ▀BŻ¼╚╗║¾åóäėsigmawin+▄ø╝■Ż¼Š═┐╔ęįī”╦┼Ę■ļŖÖC▀Mąąį┌ŠĆš{įćĪŻ╚ńłD5╦∙╩ŠĪŻ
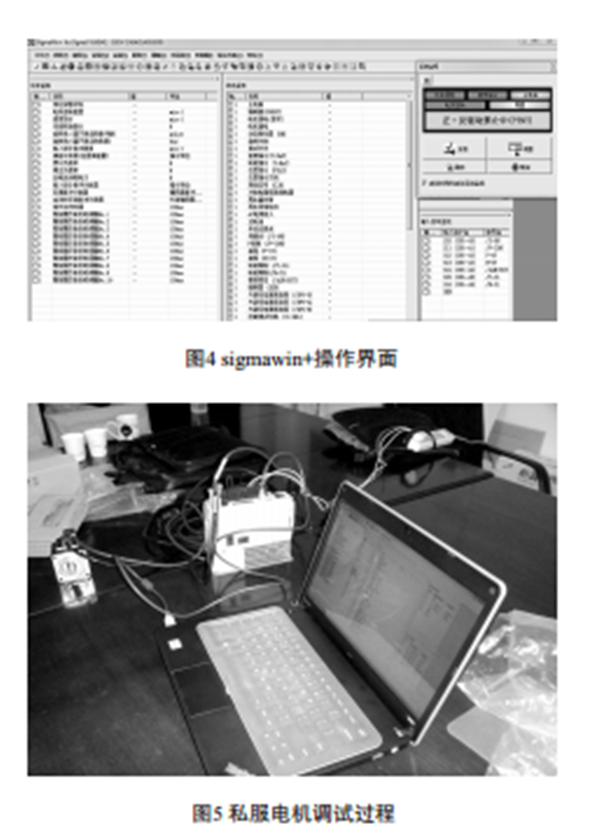
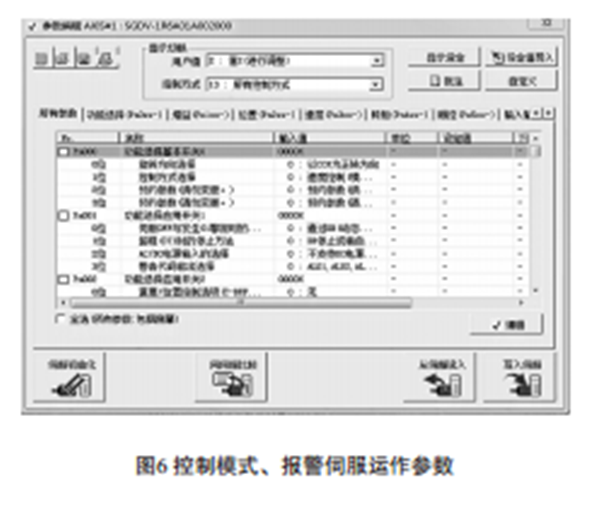
═©▀^sigmawin+▄ø╝■┐╔ęįīŹ¼Fī”╦┼Ę■ļŖÖCĄ─┐žųŲ─Ż╩Į▀xō±(╬╗ų├Ż¼╦┘Č╚Ż¼ ▐DŠž┐žųŲ)ĪóÖC─▄╩╣ė├Īó▓╗╩╣ė├įOČ©Īół¾Š»ĢrĄ─╦┼Ę■▀\ū„ĪóļŖÖC╗ž▐DĘĮŽ“Ą─įOČ©ĪóI/Oą┼╠¢Ą─ķ_öÓĪóĖ„ĘNį÷ęµĪó╬╗ų├øQČ©å╬╬╗Īó╦┘Č╚Īó╝░▐DŠžųĖ┴ŅĪóą┼╠¢Īó³cäė╦┘Č╚ĪóėąĻP▐DŠž╦┘Č╚Ą─ģóöĄĪó▀B└mģóöĄĄ╚ģóöĄĄ─įOų├ĪŻį┌▀@└’ī”┐žųŲ─Ż╩ĮĪóā╚▓┐įOČ©╦┘Č╚Īół¾Š»ĢrĄ─╦┼Ę■▀\ū„▀Mąą┴╦ŽÓæ¬įOČ©Ż¼Ųõ╦¹ģóöĄ▓╔ė├─¼šJųĄĪŻ╚ńłD6ĪółD7╦∙╩ŠĪŻ

4 ┐éĮY
ā”╣▐Ąū░Õūįäė╗»Öz£yčbų├Š▀ėą╚ńŽ┬╠ž³cŻ║
Ż©1Ż®▒Šé„ĖąŲ„öyĦčbų├æ¬ė├ßśī”ąįÅŖŻ¼▀m║Ž┴ó╩Įā”╣▐Ąū░Õ╚▒Ž▌Ą─│¼┬Ģī¦▓©į┌ŠĆÖz£yŻ¼═¼Ģrę▓┐╔ęįöyĦ│¼┬Ģ£y║±é„ĖąŲ„īŹ¼F═Ō▀ģŠē░ÕĄ─│¼┬ĢÆ▀├Ķ£y║±Ż╗
Ż©2Ż®▒Šé„ĖąŲ„öyĦčbų├┐╔ūį▀mæ¬ā”╣▐═Ō▀ģŠē░Õ▒Ē├µĄ─ŲĘ³ūā╗»Ż¼▓╗╩▄ā”╣▐═Ō▀ģŠē░Õ▌p╬óą╬ūā╝░Ė»╬gįņ│╔Ą─▒Ē├µ▓╗ŲĮš¹ę“╦žĄ─ė░ĒæŻ╗
Ż©3Ż®▒Šé„ĖąŲ„öyĦčbų├╣żū„ą¦┬╩Ė▀Ż¼┐╔īŹ¼FÖz£yé„ĖąŲ„Ą─▀B└m▀\äėŻ¼Öz£yŲ┌ķg▓╗ąĶę¬╚╦╣żĖ╔ŅAé„ĖąŲ„Ą─▀\äėŻ╗
Ż©4Ż®▒Šé„ĖąŲ„öyĦčbų├öUš╣ąįÅŖŻ¼┐╔╚źĄ¶é„ĖąŲ„╚▌Ų„┐©ū∙║═é„ĖąŲ„╚▌Ū╗Ż¼ų▒Įėį┌é„ĖąŲ„╣╠Č© ÖCśŗ╔Ž░▓čbĦėą╠žČ©═ŌĘŌčbĄ─é„ĖąŲ„Ż¼╚ńöyĦČÓéĆÖz£yé„ĖąŲ„Ą─ŽÓ┐žĻćÖz£y╝╝ągĪŻÅ─Č°īŹ¼F┴╦ę╗ÖCČÓė├Ą──┐Ą─ĪŻ ©Ź
ģó┐╝╬─½I
[1] äóÅV╬─,ĻÉ┤╬▓².┴ó╩Įā”╣▐į┌ŠĆÖz£y╝╝ąg┼c蹊┐▀Mš╣[J].ė═ÜŌā”▀\,2009,28(9):1-4.
[2] ųąć°╩»ė═╣▄Ą└╣½╦Š. ė═ÜŌ╣▄Ą└Öz£y┼cą▐Å═╝╝ąg[M].▒▒Š®: ╩»ė═╣żśI│÷░µ╔ń, 2010.
[3] äóµéŪÕ.│¼┬Ģ¤oōpÖz£yųąĄ─ī¦▓©╝╝ąg[J].¤oōpÖz£y,1999,21(8):367-375Ż«
[4] Y.C.Jung,T.Kundu and M.Ehsani,Internaldiscontinuity detection in concrete by Lamb waves,MarerialsEvaluation,418-423,2001.
[5] äó┘F├±ų„ŠÄ. ¤oōpÖz£y╝╝ąg[M]. ▒▒Š®: ć°Ę└╣żśI│÷░µ╔ń, 2006.
[6] ąż┘t▄Ŗ, äó¹É┤©, äóūė║±, Ą╚. │¼┬Ģī¦▓©╝╝ągÖz£yā”╣▐Ąū░Õ╚▒Ž▌[J]. ¤oōpÖz£y, 2008, 30(1): 6-8.
[7] ┐Ą╚~éź, ┴ų├„┤║, ═§ŠS▒¾, Ą╚. ┴ó╩Įā”╣▐Ąū░Õį┌ŠĆÖz£y╝╝ągć°ā╚═ŌäėæB[J]. ¤oōpÖz£y, 2010 (9): 725-729.
[8] š┬Š¦. īŹ¼FČÓ▌SöĄ┐žĖ▀ąį─▄╝ė╣żĄ─┐žųŲĘĮʩ蹊┐[D]. ÅV¢|╣żśI┤¾īW, 2013.
Ż©ū„š▀Ż║═§├„▓©Ż¼ų·└Ē╣ż│╠ĤŻ¼ 2013─Ļ«ģśIė┌╬„─Ž╩»ė═┤¾īWÖCąĄųŲįņ╝░ūįäė╗»īŻśI┤T╩┐蹊┐╔·Ż¼¼Fų„ę¬Å─╩┬ķL▌ö╣▄Ą└įOéõ┼c╣ż╦ć╣▄└ĒĪŻ
2014─ĻĄ┌4Ų┌Ż©┐éĄ┌17Ų┌Ż®
╔ŽŲ¬Ż║
Ž┬Ų¬Ż║
 Ė╩╣½ŠW░▓éõ 62010202003034╠¢
Ė╩╣½ŠW░▓éõ 62010202003034╠¢ 
